One common place where symmetric matrices arise in application is in defining quadratic forms, which pop up in engineering design (in design criteria and optimization), signal processing (as output noise power), physics (as potential & kinetic energy), differential geometry (as normal curvature of surfaces), economics (as utility functions), and statistics (in confidence ellipsoids).
where K=KT∈Rn×n is an n×n symmetric matrix. Such quadratic forms arise frequently in applications of linear algebra. For example, setting K=In and z=Ax−b, we recover the least-squares objective
We’ll focus on understanding the geometry of quadratic forms on R2×2. Let K=KT∈R2×2 be an invertible 2×2 symmetric matrix, and let’s consider quadratic forms:
What kinds of functions do these define? We study this question by looking at the level sets of q(x).
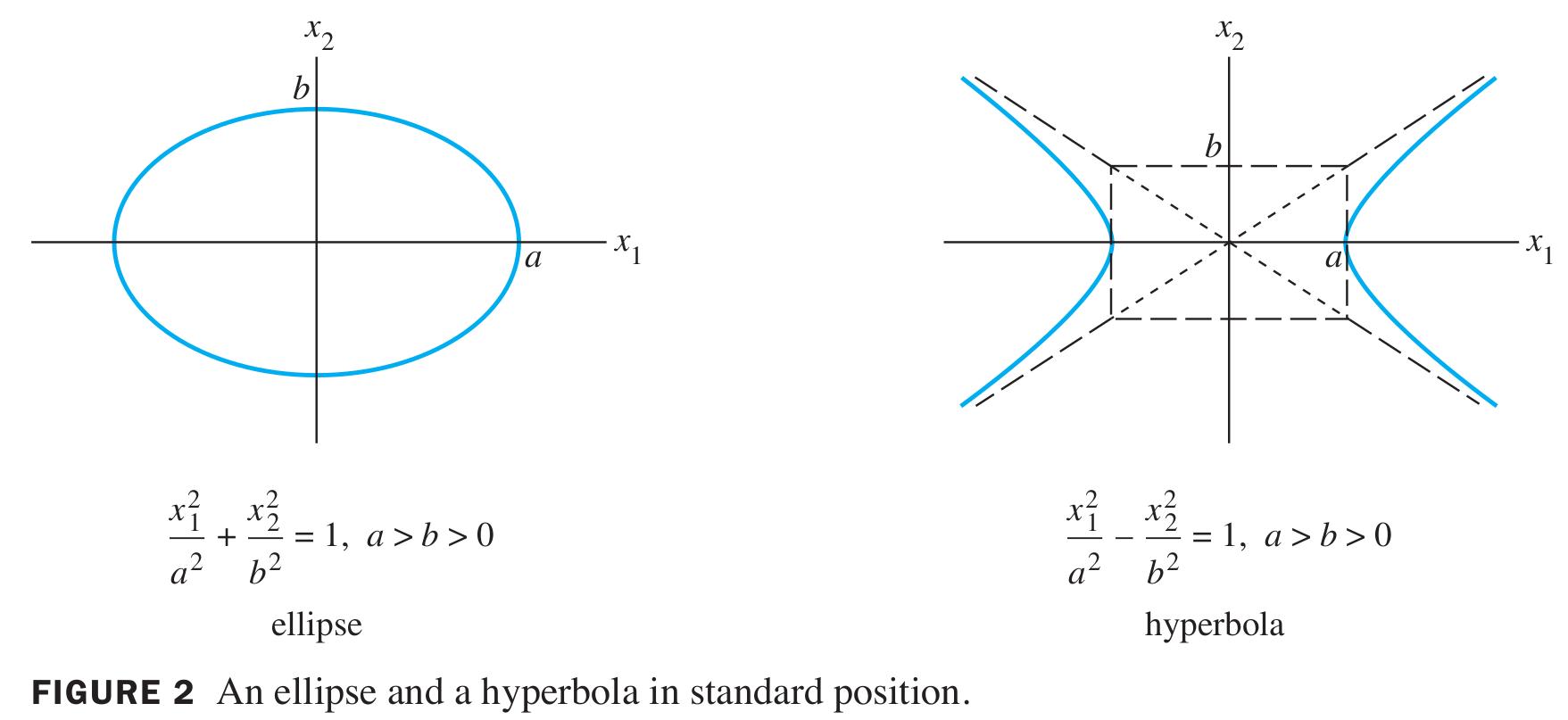
It is possible to show that such level sets correspond to either an ellipse, a hyperbola, two intersecting lines, a single point, or no points at all. If K is a diagonal matrix, the graph of (5) is in standard position, as seen below:
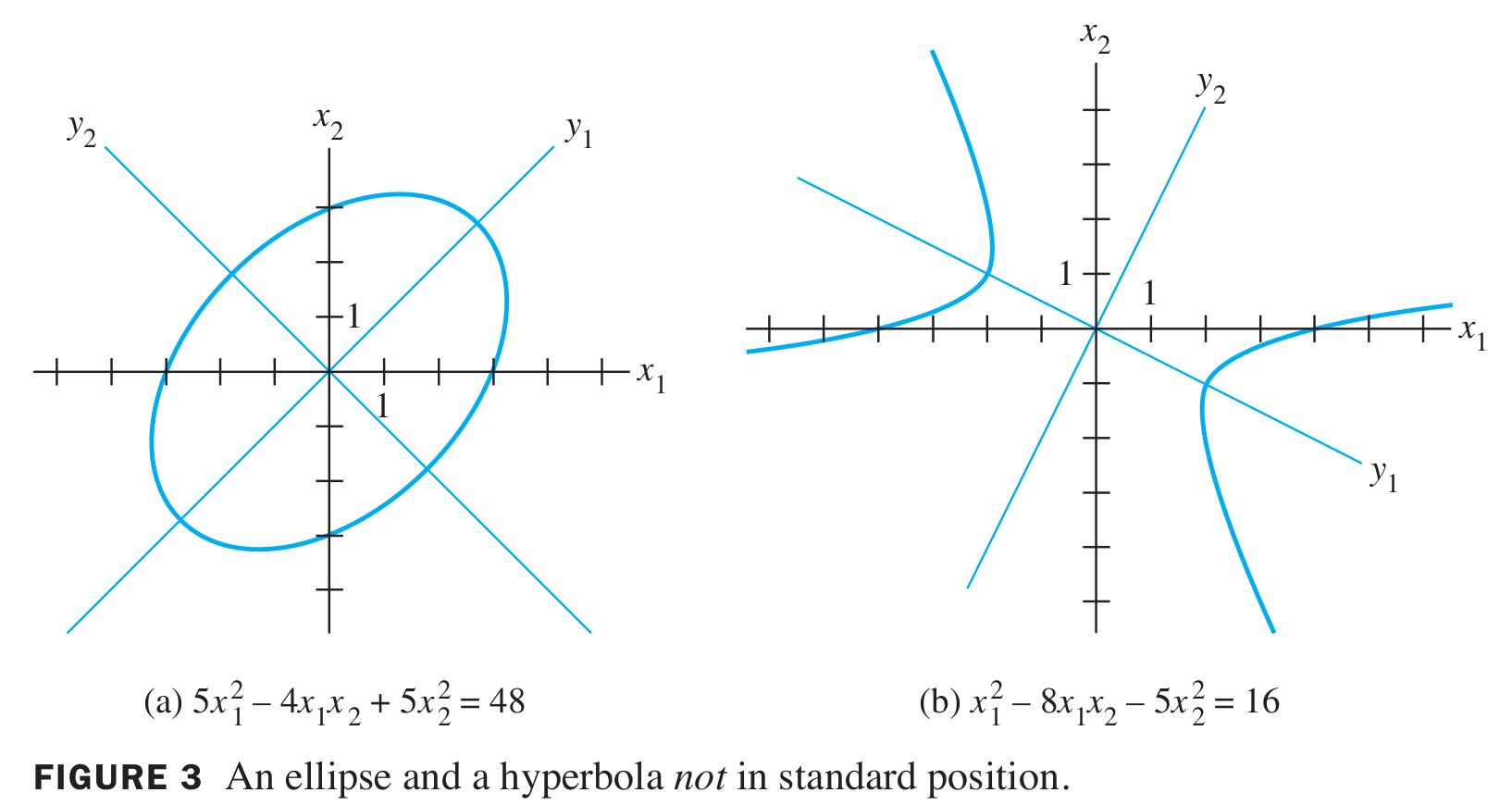
If K is not diagonal, the graph of (5) is rotated out of standard position, as shown below:
The principle axes of these rotated graphs are defined by the eigenvectors of K, and amount to a new coordinate system (or change of basis) with respect to which the graph is in standard position.
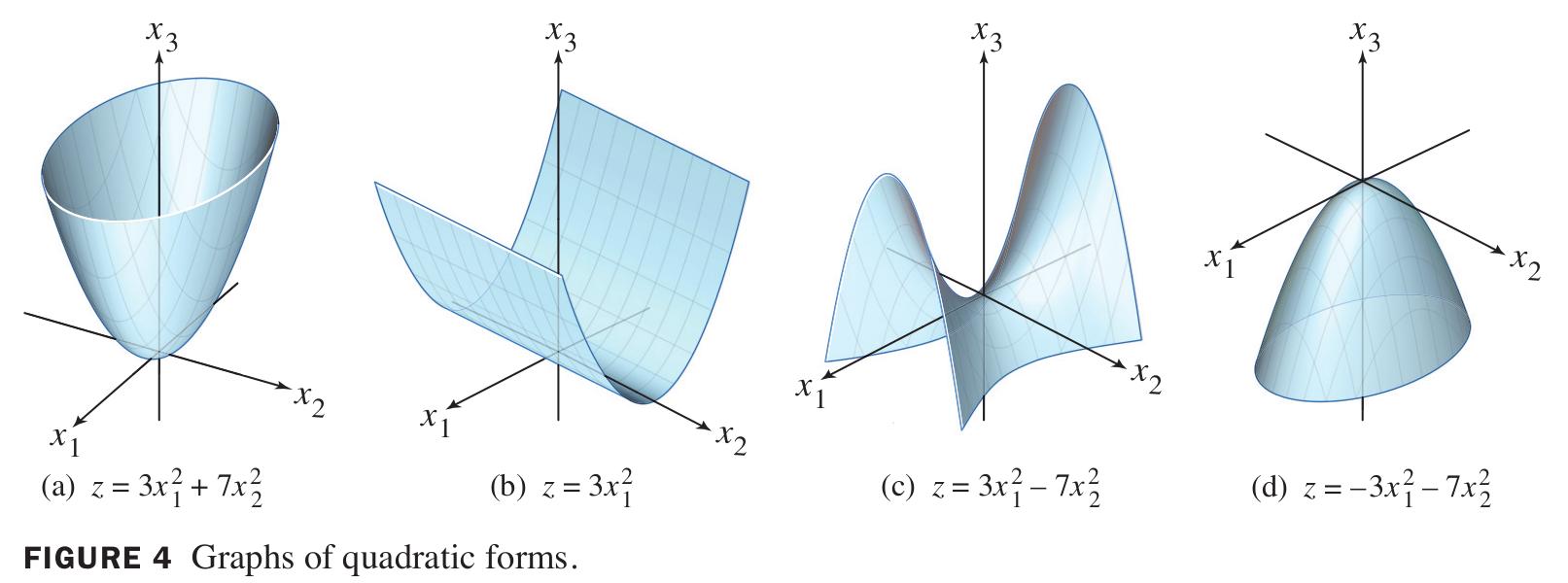
Depending on the eigenvalues of the symmetric matrix K defining a quadratic form q(x)=xTKx, the resulting function can look very different. The figure below shows four different quadratic forms plotted as functions with domain R2, i.e., we are plotting (x,y,q(x,y)).
Notice that except for x=0, the values q(x) are all positive in Fig. 4(a) and all negative in Fig. 4(d). If we take horizontal cross-sections of these plots, we get an ellipse (these are the level sets Cα we saw earlier!), the vertical cross-sections of Fig. 4(c) are hyperbolas.
This simple 2×2 example illustrates the following definitions.
Also, q(x) is said to be positive (negative) semidefinite if q(x)≥0 (≤0) ∀x: in particular, we now allow q(x)=0 for nonzero x.
The following theorem leverages the spectral factorization of a symmetric matrix to characterize quadratic forms in terms of the eigenvalues of K.